Data-driven models of human avatars have shown very accurate representations of static poses with soft-tissue deformations. However they are not yet capable of precisely representing very nonlinear deformations and highly dynamic effects. Nonlinear skin mechanics are essential for a realistic depiction of animated avatars interacting with the environment, but controlling physics-only solutions often results in a very complex parameterization task. In this work, we propose a hybrid model in which the soft-tissue deformation of animated avatars is built as a combination of a data-driven statistical model, which kinematically drives the animation, an FEM mechanical simulation. Our key contribution is the definition of deformation mechanics in a reference pose space by inverse skinning of the statistical model. This way, we retain as much as possible of the accurate static data-driven deformation and use a custom anisotropic nonlinear material to accurately represent skin dynamics. Model parameters including the heterogeneous distribution of skin thickness and material properties are automatically optimized from 4D captures of humans showing soft-tissue deformations.
@article {romero2020skinmechanics,
journal = {Computer Graphics Forum (Proc. Eurographics)},
title = {{Modeling and Estimation of Nonlinear Skin Mechanics for Animated Avatars}},
author = {Romero, Cristian and Otaduy, Miguel A. and Casas, Dan and Perez, Jesus},
year = {2020}
}
We present a hybrid model of soft-tissue animated avatar that combines a statistical human body model (SMPL) with an FEM mechanical simulaton. Our model supports highly-dynamic animations and external interactions by using a custom nonlinear and anisotropic material. This allows realistic soft-tissue deformations with tight cloth and self collisions.
We define deformation mechanics in an unpose reference space by computing the inverse skinning of the statistical body model. This allows us to preserve as much as possible of the data-driven static deformation. In contrast to previous work on modeling skin mechanics, in absence of dynamics and external forces our model matches the static deformations of the data-driven surface body model.
We estimate soft-tissue thickness and material parameters from unposed 4D scans. We show how our method correctly fits parameters with only 2 training sequences, and generalize well to unseen test sequences.
Below we show 3 examples of posed avatars (inset) subject to various soft-tissue deformations expressed in unposed space through a color map.
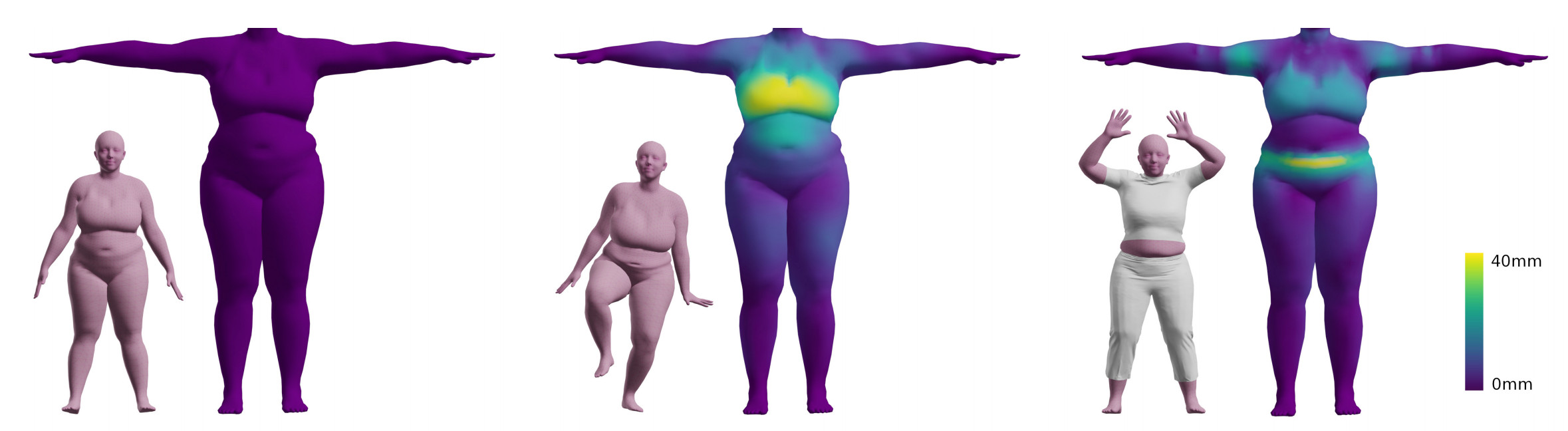
For a static pose (left), the unposed shape is undeformed and identical to the reference shape. For highly dynamic (center) or external interaction (right) scenarios, the unposed shape shows high-frequency local deformations
